内含中英文MPU6050手册,寄存器手册。
”mpu6050中文手册 6050芯片手册 MPU 单片机 姿态传感器“ 的搜索结果
内含中英文MPU6050手册,寄存器手册。
基于STM32的四旋翼无人机项目之MPU6050姿态解算教程,作者手把手教学MPU6050的姿态解算(含卡尔曼滤波教学),同时包含匿名上位机通讯代码教学和使用!
使用芯片:MPU-6050(MPU-6050数据手册) 供电电源:3-5v(内部低压差稳压) 通信方式:标准IIC通信协议 芯片内置16bit AD转换器,16位数据输出 陀螺仪范围:±250 500 1000 2000 °/s 加速度范围:±2±4±8±16g MPU-...


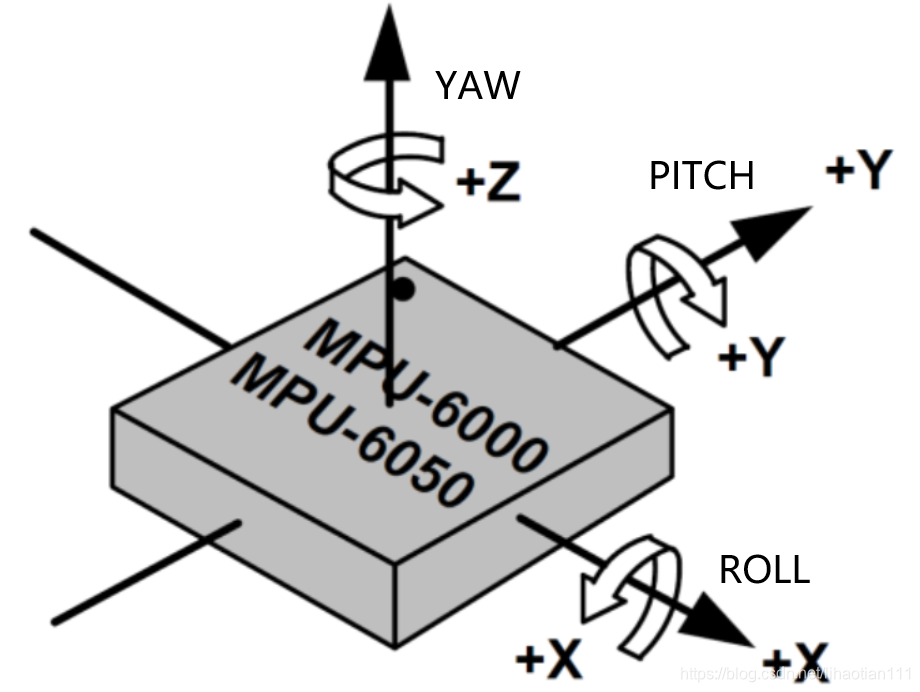

MPU6050是一个6轴姿态传感器(3轴加速度计和3轴陀螺仪传感器),可以测量芯片自身X、Y、Z轴的加速度、角度参数,通过数据融合,可以得到姿态角。

选用MPU6050做 倾斜检测 功能。
MPU6050是由InvenSense公司生产的一款六轴运动跟踪设备,它集成了一个三轴陀螺仪和一个三轴加速度计。这个小巧的芯片能够通过I2C总线与微控制器通信,广泛用于需要运动或方向检测的设备中。:可以测量设备绕三个空间...

最近开始使用了6轴姿态传感器MPU6050,准备学习一下姿态融合,于是打算写下了这篇博客。

MPU6050模块是一款由InvenSense公司生产的数字运动处理器,它集成了三轴陀螺仪和三轴加速度计,采用MEMS技术,可以通过I2C接口与其他微控制器进行通信。MPU6050模块中的加速度计和陀螺仪分别测量物体在三个轴上的加...
只需要接4个引脚,即:VCC、GND、SCL、SDA其余的引脚是用来接电磁传感器形成九轴传感器SCL和SDA是连接MCU的IIC接口,MCU通过这个IIC接口来控制MPU6050,另外还有一个IIC接口:AXCL和 XDA,这个接口可用来连接外部从...
详解STM32+MPU6050姿态解算—附3个算法源码—卡尔曼滤波+四元数法+互补滤波——可应用在无人机/平衡车/机器人等方面
假如我们同时使用这两种传感器,并设计一个滤波算法,当物体处于静止状态时,增大加速度数据的权重,当物体处于运动状态时,增大陀螺仪数据的权重,从而获得更准确的姿态数据。来设置,这个前面我们已经介绍了,该...
陀螺仪在你设置好参数之后,就会根据你设置的参数获取数据,数据存储在对应的寄存器中,你可以通过对应寄存器读取到想要的数据。我们是使用这个装置(或者说设备)获取到数据,再使用这个数据得到我们想要的信息。...
MPU6050简介MPU6050和其它传感器有类似的地方,也有不同的地方。类似的地方是输出一个物理量,比如加速度值,角速度值,温度值等。不同的地方是MPU6050输出的数据可以通过一些算法处理后,得到一些更“高级”、更...
简单的介绍一下是什么mpu6050,有什么用,如何使用,并且给出代码包,不考虑内部过于数学的解算,从代码封装和使用角度分析。

同步,半双工。异步通信(如串口)如果发送方发送一半突然进中断停止了,接收方是不知道的,这是不允许的,异步对硬件外设USART电路依赖性很强,虽然也可软件实现,但因为对时间要求严格所以一般不用软件。...



MPU6050中的DMP(数字运动处理器)对姿态进行融合,STM8单片机通过IIC读取DMP的处理结果,再添加上包头串行输出三轴加速度、三轴角速度、三轴角度和温度数据,输出频率为100Hz。 MPU6050芯片内部由四部分...
推荐文章
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地
- Python 攻克移动开发失败!_beeware-程序员宅基地
- Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
- 元素三大等待-程序员宅基地
- Java软件工程师职位分析_java岗位分析-程序员宅基地
- Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
- 标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地